- · 《时代报告》栏目设置[06/29]
- · 《时代报告》投稿方式[06/29]
- · 《时代报告》征稿要求[06/29]
- · 《时代报告》刊物宗旨[06/29]
一、稿件要求: 1、稿件内容应该是与某一计算机类具体产品紧密相关的新闻评论、购买体验、性能详析等文章。要求稿件论点中立,论述详实,能够对读者的购买起到指导作用。文章体裁不限,字数不限。 2、稿件建议采用纯文本格式(*.txt)。如果是文本文件,请注明插图位置。插图应清晰可辨,可保存为*.jpg、*.gif格式。如使用word等编辑的文本,建议不要将图片直接嵌在word文件中,而将插图另存,并注明插图位置。 3、如果用电子邮件投稿,最好压缩后发送。 4、请使用中文的标点符号。例如句号为。而不是.。 5、来稿请注明作者署名(真实姓名、笔名)、详细地址、邮编、联系电话、E-mail地址等,以便联系。 6、我们保留对稿件的增删权。 7、我们对有一稿多投、剽窃或抄袭行为者,将保留追究由此引起的法律、经济责任的权利。 二、投稿方式: 1、 请使用电子邮件方式投递稿件。 2、 编译的稿件,请注明出处并附带原文。 3、 请按稿件内容投递到相关编辑信箱 三、稿件著作权: 1、 投稿人保证其向我方所投之作品是其本人或与他人合作创作之成果,或对所投作品拥有合法的著作权,无第三人对其作品提出可成立之权利主张。 2、 投稿人保证向我方所投之稿件,尚未在任何媒体上发表。 3、 投稿人保证其作品不含有违反宪法、法律及损害社会公共利益之内容。 4、 投稿人向我方所投之作品不得同时向第三方投送,即不允许一稿多投。若投稿人有违反该款约定的行为,则我方有权不向投稿人支付报酬。但我方在收到投稿人所投作品10日内未作出采用通知的除外。 5、 投稿人授予我方享有作品专有使用权的方式包括但不限于:通过网络向公众传播、复制、摘编、表演、播放、展览、发行、摄制电影、电视、录像制品、录制录音制品、制作数字化制品、改编、翻译、注释、编辑,以及出版、许可其他媒体、网站及单位转载、摘编、播放、录制、翻译、注释、编辑、改编、摄制。 6、 投稿人委托我方声明,未经我方许可,任何网站、媒体、组织不得转载、摘编其作品。
汽车电子电气架构专题报告:从特斯拉看汽车电
作者:网站采编关键词:
摘要:如需报告请登录【未来智库】。 1、汽车电子电气架构:汽车的中枢神经 1.1. 汽车电子电气架构 EEA:电子电气设计的整体解决方案 汽车电子电气架构 E/E 架构(EEA, Electrical/Electronic Archite
如需报告请登录【未来智库】。
1、汽车电子电气架构:汽车的中枢神经
1.1. 汽车电子电气架构 EEA:电子电气设计的整体解决方案
汽车电子电气架构 E/E 架构(EEA, Electrical/Electronic Architecture)由德尔福公司提出。汽车电子电气架构将传感器、ECU、线束、电子电气分配系统整合,实现了汽车整体的配置和功能的实现。
E/E 架构通过物理层面的布置,对车身信息进行转化和处理,为汽车电子电气设计提供了整体的解决方案。车上每一个功能都有一个最基础的电气架构作为支撑,包括供电、控制、执行、反馈等回路,而整车的电子电气架构就是这些基础电气架构的有机组合。
电子电气架构市场规模较大,ECU/DCU 占比最高。电子电气架构设计组件包括软件、ECU/DCU、集成验证、动力系统、传感器以及其他包括线束在内的电气器件。2020 年软件与电子电气架构市场规模 2380 亿美元,ECU/DCU 市场规模 920 亿美元,占比 38.7%。

1.2. 大部分车企仍处于分布式架构阶段
目前大部分车企仍处于分布式架构阶段,小部分车企出现分域的概念。目前整车的控制体系以电控单元 ECU 为核心,每个功能对应一个或多个 ECU,比如加热装置 ECU、多媒体系统 ECU 等等。
电子控制单元 ECU( Electronic Control Unit)是汽车专用微机控制器。一般由 CPU、存储器(ROM、RAM)输入/输出接ロ(WO)、模数转换換器(AD)以及驱动等大规模集成电路组成。随着汽车的电子化发展,ECU 由用于控制发动机逐渐深入到整个汽车,一辆车上的 ECU 个数也急剧增多。从 1993 年到 2010 年,奥迪 A8 上使用的 ECU 个数从 5 个快速增加到超过 100 个。

随着汽车需要实现的功能越来越复杂、ECU 的数量越来越多,部分车企一方面将 ECU 按照车身、底盘、动力、信息娱乐等进行域的划分,另一方面通过中央控制网关实现跨功能连接,加强各个部件的协作。

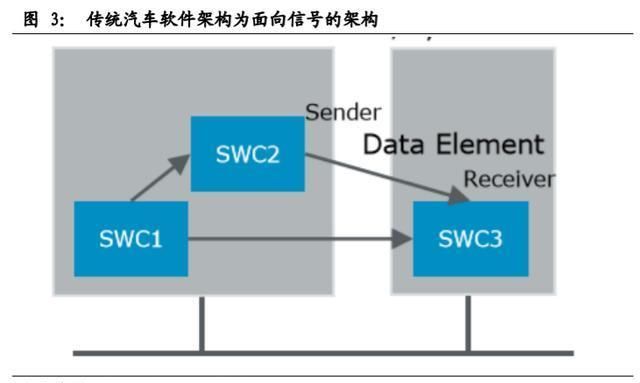
1.3. 传统软件架构及其开发模式以面向信号为中心
传统汽车软件架构为面向信号的架构(Signal-Oriented Architecture),ECU 之间基于信号进行点对点的通讯。在面向信号的架构中,整个系统是“封闭静态分布式系统”,所有的决策在架构设计时被完成。车辆的软件与组件相互绑定,无法统一对软件进行开发和修改。
面向信号的架构优势在于系统的已知性和可预测性。设计师可以在设计时对资源进行优化,比如消息副本和总线调度。劣势在于运行时的灵活性低,以及系统在后续无法拓展。同时,面向信号的架构只使用具有发送发/接收方接口的软件组件,因而不支持更加复杂的功能实现。
1.4. 传统车企的信号传输以 CAN/LIN 总线为主
控制器局域网络 CAN(Controller Area Network)是国际上应用最广泛的现场总线之一。CAN 总线解决现场控制设备和高级控制器之前的信息传递问题,是自动化领域中底层数据通信网络。在现代大型整车厂的汽车设计中,CAN 已经成为首选装置。与其它现场总线比较而言,CAN 总线具有通信速率高、检错处理高效、性价比高等优势。
局部互联协议(LIN 总线)是面向汽车低端分布式应用的低成本,低速串行通信总线。OEM 使用 LIN 总线主要是为了在不需要 CAN 总线的带宽和多功能的时候降低成本,同时可以为汽车网络提供辅助功能。
LIN 总线与 CAN 总线相比在成本上的优势,主要源于其单线传输的特点、硅片中硬件或软件的低实现成本,以及其无需在从属节点中使用石英或陶瓷谐振器。而这些的代价就是 LIN 总线以较低的带宽和受局限的单宿主总线访问方法。
2. 汽车 E/E 架构变革时代,朝着多域控制发展
2.1. 汽车电子电气架构从分散式向更集中的多域控制升级
E/E 结构变革可以分成五个阶段,目前大部分车企仍处于第三代 E/E 分布式体系到第四代的变化过程中,从分散式走向更集中。在第三代 E/E体系中,功能在具有高度软件到硬件(SW-to-HW)集成的 ECU 上。第四代 E/E 体系中出现核心域控制器,在整合多个功能的基础上进行成本优化和更多功能的实现
按照麦肯锡的定义,E/E 结构可以划分为五个阶段:1、出现独立 ECU,功能根据 ECU 进行一定程度的分离,功能与 ECU 一一对应;2、出现分域的概念,包括动力、底盘、车身等等域,同一个域的 ECU 被合并,域与域的交流较少;3、通过控制网关跨功能连接加强域与域的联系,可以处理更加复杂的功能,比如自动驾驶;4、出现核心域控制器对功能进行整合,可以实现更复杂的功能;5、出现虚拟域,专属硬件减少,应用以太网加强通讯能力,汽车更像是一台高性能电脑。
文章来源:《时代报告》 网址: http://www.sdbgzz.cn/zonghexinwen/2020/0801/435.html